
温馨提示:这篇文章已超过418天没有更新,请注意相关的内容是否还可用!
伺服电机工作条件及原理
伺服主要依靠脉冲来定位。基本上可以这么理解。当伺服电机接收到脉冲时,会旋转与脉冲对应的角度,从而实现位移。由于伺服电机本身具有发出脉冲的功能,因此伺服电机每接收到一个脉冲就会旋转一次。当旋转一个角度时,就会发射出相应数量的脉冲。
伺服系统主要由控制器、动力驱动装置、反馈装置和电机三部分组成。控制器根据数控系统的给定值与反馈装置检测到的实际运行值之间的差异来调整控制量。
功率驱动装置作为系统的主电路,根据控制量将电网中的电能施加到电机上,并调节电机的扭矩。另一方面,它根据电机的要求,转换来自电网的恒压、恒频电源。是电机所需的交流电或直流电;电机根据电源驱动机器运转。
扩展信息
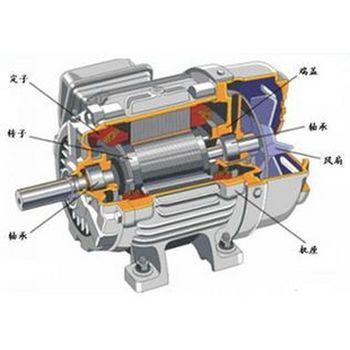
交流伺服电机的转子通常采用鼠笼式。然而,为了使伺服电机具有较宽的调速范围、线性机械特性、无“自转”现象和快速响应性能,与普通电机相比,应具有转子具有电阻大和转动惯量小两个特点。
广泛应用的转子结构有两种:一种是采用高电阻率导电材料制成的鼠笼式转子。为了减小转子的转动惯量,将转子做得细长。
另一种是铝合金制成的空心杯形转子。杯壁很薄,只有0.2-0.3mm。为了减少磁路的磁阻,在空心杯形转子内部放置固定的内定子。空心杯转子转动惯量小,响应快,运转平稳,因而得到广泛应用。
当交流伺服电机中没有控制电压时,定子中只有励磁绕组产生脉动磁场,转子保持静止。当有控制电压时,定子中产生旋转磁场,转子沿旋转磁场的方向旋转。当负载一定时,电机的转速随控制电压的变化而变化。当控制电压的相位相反时,伺服电机将反转。
参考来源:百度百科-伺服系统
参考来源:百度百科-伺服电机
伺服电机是如何工作的?
伺服系统是一种能够使输出对象的位置、方向、状态等受控量跟随输入目标的任何变化的自动控制系统。伺服主要依靠脉冲来定位。基本上可以理解为,当伺服电机接收到脉冲时,就会旋转该脉冲对应的角度,从而实现位移。
由于伺服电机本身具有发射脉冲的功能,伺服电机每旋转一个角度,就会发射出相应数量的脉冲,与伺服电机接收到的脉冲相呼应。这样,系统就会知道有多少脉冲发送到伺服电机。同时接收回多少个脉冲,这样就可以非常精确地控制电机的转动,从而实现精确定位。
伺服电机的工作原理是向伺服控制器输入控制信号,伺服控制器将信号传输给伺服电机。伺服电机接收到信号后,会根据信号控制自身的运行状态,从而实现精确控制。伺服电机内部的反馈系统可以监视和调整电机的运行状态,使电机运行在预定的位置和速度。在伺服电机中,通常采用编码器作为反馈传感器,通过检测电机转子的位置和速度信号来控制和调节电机。伺服电机的控制算法有很多种,其中比较常见的有PID控制算法、模糊控制算法、自适应控制算法等。PID控制算法是指比例-积分-微分控制算法。其基本思想是对误差进行比例、积分、微分处理,得到控制信号。模糊控制算法是一种用模糊数学来描述系统并通过推理和判断获得处理结果的非线性控制算法。自适应控制算法是一种自主学习控制算法,可以随着时间的推移不断调整和优化自身,以提高电机的控制精度。在伺服电机应用中,通常使用闭环控制。闭环控制是指利用反馈信号对系统进行控制,以提高控制精度。与闭环控制相反的是开环控制。开环控制仅根据输入信号控制输出。没有反馈环节,容易受到外界干扰,导致控制误差较大。
伺服驱动器CN1引脚定义,以及面板操作设置,恳请高手指点。我丢失了使用说明书。脉冲、使能、方向、连接哪个引脚
伺服驱动器CN1引脚定义及面板操作设置?根据给出的图片,我们可以看到这是通惠伺服放大器型号TH-100HA。我们先来了解一下伺服驱动器的硬件结构和系统原理。伺服驱动器的硬件结构及其系统原理。主要介绍三个内容: 第一:伺服驱动器的硬件结构。第二:伺服驱动器主要部件说明(主要是主电路部件)。第三:伺服驱动器的工作原理。 1、伺服驱动器硬件结构:如图1所示:
左边这个是我们伺服驱动器的外观。左边我圈出了红线,让大家看看它的操作面板。它的参数设置以及一些参数的监控都可以在这里看到。右边是它的前面板。面板请看下图,如图2:
依然是右图。伺服驱动器前面板左侧有3个接线口。我已经给大家展示过了,1个电源口,2个控制电源口,3个电机接线口。右边,上面两个是通讯口,中间一个IO口下面是我们的编码器,编码器的接线是我们电机反馈回来的。我们这里有实物。请看下面的图片,如图3所示:
这两款都是松下伺服驱动器,左边一款是400W,右边一款是750W。然后看下图,如图4:
这两个是伺服电机。我们左边的是400W。你看,后面黑色的东西就是编码器。后面的粗黑线是编码器线。前面的电线是连接电源的电源线。右边的和左边的伺服电机是一样的,只是尺寸和功率不同。接线也一样。它后面还有一个编码器。那我们普通的伺服电机呢?编码器安装在电机后面。我们需要将其编码器接线连接到伺服驱动器作为反馈。我们看一下伺服驱动器的接线端子,如图5所示:
(图片来源互联网,侵删)
大家现在可以清楚的看到,我们现在的驱动器大部分都是单相220V的,因为它们的功率比较小,但是也有三相380V和三相220V的。我在这里给大家介绍一下这款220V的。上面的L1C和L2C连接到控制电源。 L1、L2接单相220V电源。下面的U、V、W是伺服电机的输出,需要连接我们的伺服电机,CN1是我们的IO口,开关量和模拟值都在上面。 CN2是编码器反馈给我们的脉冲信号,连接到伺服驱动器。 CN3和CN4两个水晶头插座是我们的通讯口,这个伺服驱动器是汇川技术的。你想一想,他们和同惠的人一样吗?事实上,它们都是相似且相同的。
伺服电机的原理是什么?
伺服是一种提供闭环反馈信号来控制位置和速度的装置。伺服广泛应用于半导体设备,如涂胶机、光刻机等设备。以下是关于伺服电机相关问题的总结。希望对以后的工作有所帮助。 1、伺服电机为什么不丢步?伺服电机驱动器接收电机编码器的反馈信号,并与指令脉冲进行比较,形成位置的半闭环控制。因此,伺服电机不会丢步,并且能够可靠地响应每个指令脉冲。 2、伺服电机机械安装时应特别注意什么?由于每个伺服电机的后端都安装有旋转编码器,它是一个非常脆弱的精密光学器件,过度的冲击肯定会损坏它。 3、伺服电机如何调整?伺服电机的调节方式有多少种?答:使用Twin Line软件调整电机的PID参数、电机参数、电子齿轮比等。 4、我们希望在我们的产品中使用伺服电机来替代步进电机。我们应该注意哪些问题? A、为保证控制系统不发生较大改变,应选用数字伺服系统,仍可采用原来的脉冲控制方式; B、由于伺服电机具有一定的过载能力,因此在选择伺服电机时,经验可以根据步进电机输出扭矩的1/3作为参考来确定伺服电机的额定扭矩; C、伺服电机的额定转速远高于步进电机的转速。为了充分发挥伺服电机的性能,最好加装减速装置,让伺服电机工作在接近额定转速的情况下,这样也可以选择较小功率的电机来降低成本。转载请注明出处:电气自动化技术网http://www.dqjsw.com.cn



